MBot Troubleshooting Guide
Got a problem with your MBot? You’re in the right place! This section has detailed guides to help you troubleshoot and fix the most common MBot problems.
Where do I start? Check out the Common Problems first. This section will have checklists of the most important things to check to fix the most common problems.
These more detailed troubleshooting guides are available:
- Hardware: Problems with the MBot Control Board, motors, encoders, or other sensors.
- Software: Problems with the MBot software.
- Networking: Problems with connecting to the MBot.
Common Problems
Here are some common issues and how to fix them:
- My robot is not driving
- My robot is driving crooked
- I can’t flash the MBot Control Board
- My MBot Control Board keeps disconnecting (you periodically lose the ability to drive the robot or lose access to odometry)
- My robot won’t connect to WiFi
- Mapping isn’t working
Got a different problem? If you have a problem you think should be added to this section, create an issue or email um-mbothelp@umich.edu.
My robot is not driving
After you calibrate and flash your robot, you should test your robot by driving it using the web app.
If the robot wheels do not turn at all, here are some things to check:
-
Did you flash the correct firmware? For the robot to be teleoperated from the web app, you need to have flashed the firmware. You can get the code from the Calibration & Flashing Guide.
Make sure flashing succeeded without errors! When you run the
mbot-upload-firmwarecommand, you should not see any errors. If you are getting errors, see “I can’t flash the MBot Control Board”. -
Are the cables connected correctly? You should have these connections for the MBot Control Board to work and communicate with the Raspberry Pi:
- A USB cable connecting the MBot Control Board (USB-C) to the Raspberry Pi (USB).
- A Y-shaped barrel cable with one end connected to the battery pack and the other connected to the MBot Control Board.
For details and illustrations, see the Assembly Guide for your platform in the Hardware section.
Still not working? If you still can’t drive your robot, you may have a hardware problem. Check that the device /dev/mbot_tty exists and check for errors in the service mbot-lcm-serial.service (see the Software Guide for instructions). You may have to replace the USB cable or the Pico.
My robot is driving crooked
After you calibrate and flash your robot, you should test your robot by driving it using the web app.
The robot will not drive perfectly straight, but it should be pretty close! If your robot is driving “wonky”, see the Hardware Troubleshooting Guide.
I can’t flash the MBot Control Board
If you are trying to flash the MBot Control Board with a firmware file, using the mbot-upload-firmware command, you might see an error that says:
No accessible RP2040 devices in BOOTSEL mode were found.
If you see this error, the firmware did not flash correctly. Here are some things to check:
- Make sure the Pico is in Boot Mode. See the Firmware Flashing Tutorial for instructions to do this. The buttons are small, so make sure you are pressing them and releasing them in the correct order!
-
Do you have automatic flashing set up? If you are using the
RSTandBOOTSELbuttons to put the Pico into Boot Mode and still getting the error above, you may have a known issue with automatic flashing (this feature is new and may not always work!).Check if you have these cables connected to the MBot Control Board (the green and white wires).
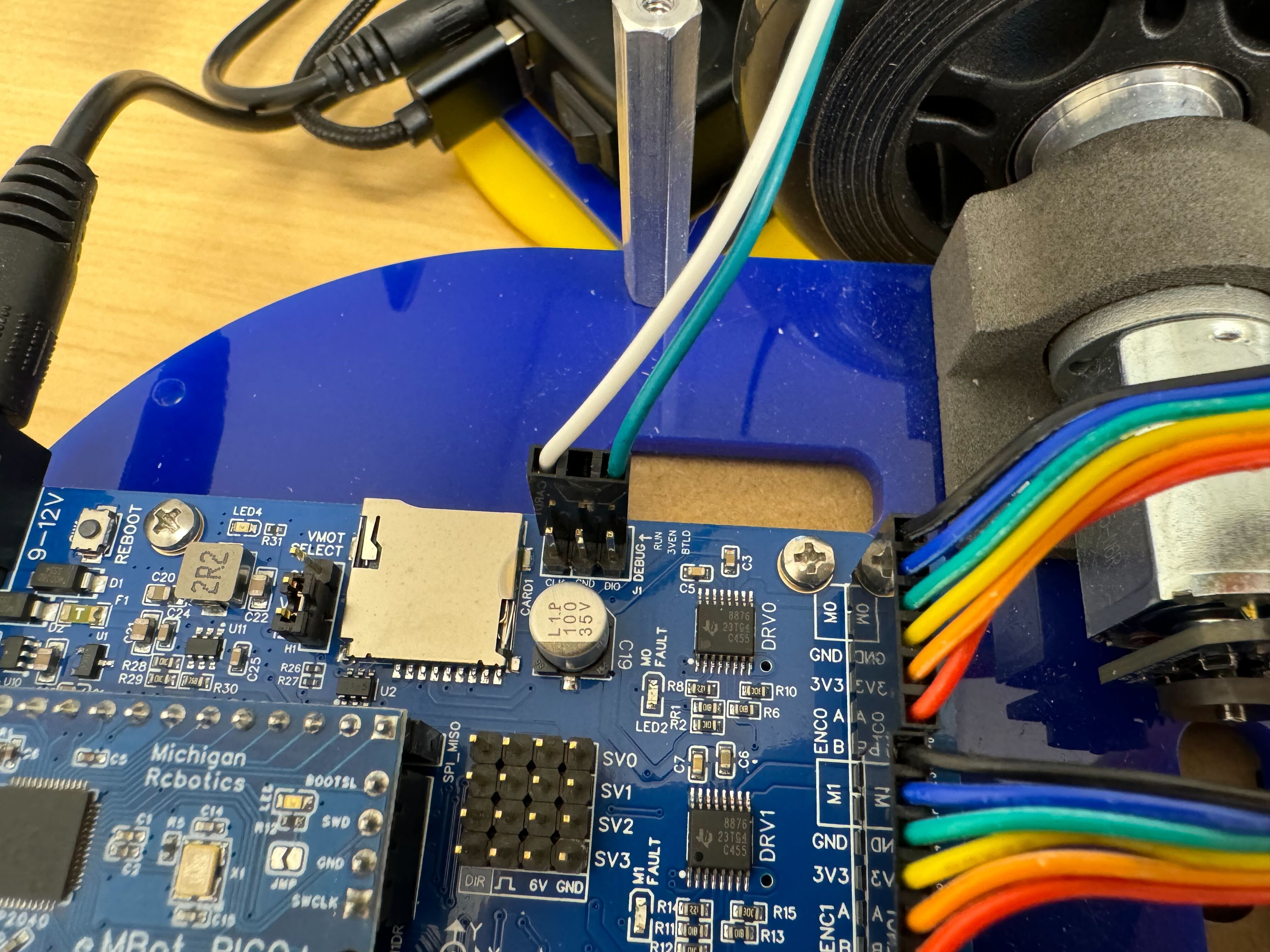
If so, unplug the connector from the MBot Control Board to disable automatic flashing. Put the board in Boot Mode manually (see the Firmware Flashing Tutorial for instructions), then try again.
- Try holding
BOOTSELfor longer. If step 1 and 2 don’t work for you, when you are putting the board in Boot Mode, try holding down theBOOTSELbutton for 5-10 seconds after you releaseRST.
Still not working? If you still can’t flash your Pico, it may need to be replaced.
My MBot Control Board keeps disconnecting
Note: This section is specifically for intermittent disconnections, meaning sometimes you can control the robot, and sometimes you can’t. If your MBot Control Board is never connecting (you can never drive the robot or read odometry), see My robot is not driving.
Here are some signs that your MBot Control Board is periodically disconnecting:
- Your robot occasionally loses access to odometry,
- Your robot sometimes stops being drivable,
- Your robot gets stuck driving at some velocity you sent it but then loses control and can’t be controlled.
If you are experiencing these issues, you may have a low battery or a bad battery.
How do I fix it? You should replace your battery with a new, fully charged one. If your battery is very old (multiple years), you may consider retiring it and replacing it with a brand new battery.
How do I check if my MBot Control Board is disconnecting? Monitor the LCM channels and check to see whether the channels published by the MBot Control Board (these are the IMU data, encoder data, and odometry) stop publishing data when the problem is occurring. There are two ways to look at the channel:
-
Use the LCM Monitor web tool by going to
http://<MBOT-IP>/spyin your browser, replacing all of<MBOT-IP>with your MBot’s IP (see What’s my MBot’s IP? if you don’t know your IP).Not seeing the LCM Monitor App? It may not be installed. You can install it following these instructions.
-
If you are connected in NoMachine, open a terminal and type
lcm-spy.
The MBot Control Board channels (IMU, encoder, odometry) will stop coming in if the board is disconnected (you can look at the “count” property to see if the data is coming in).
Note: This is much more likely to happen with MBots that use the Raspberry Pi 5 (instead of the Raspberry Pi 4). The Raspberry Pi 5 draws much more power, so you may see this happen when more power is demanded, like when driving the motors and while the Lidar is spinning.
My robot won’t connect to WiFi
If your robot is not connecting to WiFi or not reporting its IP, check the Networking Troubleshooting Guide.
Mapping isn’t working
If you are toggling localization on and then it is immediately toggling off again, or if no map is being made in mapping mode, something is going wrong with SLAM.
Check the following, in this order:
- Is your Lidar plugged in? SLAM needs the Lidar scan to work!
- Can you drive your robot? If not, it is likely that odometry is not working either, and SLAM needs odometry to work. See the Hardware Troubleshooting Guide to fix it.
Lidar spinning and Robot Control Board working but SLAM still isn’t working? Try these steps:
- Restart your robot. If any program got into a funny state or crashed, a reboot will fix it. If the problem persists, follow the next steps.
- Check the logs and services. These instructions also tell you how to get a log to send to course staff for help if your problems persist.
- Check LCM channels. If you can’t find the issue in the services, you might check that all the correct data is being published. Do you see the Lidar scan and odometry data coming in?